


カーナビの道は線から面へ ―運転の無理・無駄・無茶を減らす地図情報―
自動運転のカギを握る要素技術の一つが地図情報だ。自動車専用道には高精度地図データがあるが、一般道に同じものを構築することは難しい。また、車両側のAI(人工知能)の性能にも限界がある。独自開発のソリューションで課題解決に挑む、日立製作所 ライフ事業統括本部 デジタルフロント事業本部 コネクテッドカー本部 主管技師の野村高司氏に話を聞いた。
Date:2020/02/11
聞き手:林愛子(サイエンスデザイン)
高精度な地図がなくともレベル4は可能?
――自動運転の高度化には地図の進化が欠かせないと言われています。
野村氏(以下敬称略): そうですね。今後レベル3・4・5を実現するために乗り越えるべき障壁のなかでも、私たちは特にAIと地図に注目しています。

日立製作所 野村高司氏 (撮影:林愛子)
AIには認識・判断・予測という3つの機能が求められ、技術的には予測が最も難しいです。最近はディープラーニングを使った危険予知の研究開発が盛んですが、まだまだ途上にあり、レベル3の実現も難しいでしょう。また、地図はダイナミックマップ基盤(DMP)の高精度3次元地図がありますが、カバーしているのは自動車専用道を中心とする全長約3万kmのみ。一般道は全国に150万km以上あり、ここにもDMP方式の地図を導入しようとすると国家予算を超える資金が必要で、現実的ではありません。
ではどうしたらよいのか、課題解決のための2つの仮説を立てました。1つはハードウェアの進化。現状の光学カメラやミリ波レーダ、LiDARはまだまだ価格が高く、性能も十分ではありませんが、2023年~2025年にセンサの高性能化・低コスト化・小型化が起こるとされ、そうなれば小型車にも搭載できるようになるでしょう。さらにそれらの利用技術の高度化も進みます。
もう1つの仮説は地図データの新たなコンテンツの登場。現状のAIの予測機能には限界がありますが、参照するコンテンツによってはAIの機能を補うことができ、予測精度が向上する可能性があります。
――つまり、カメラなどのハードウェアが進化し、新たなコンテンツで予測機能が強化されれば、レベル3・4・5の実現が近づくということですね。
野村: 現状の自動運転システムは地図情報を真値と位置付け、各種センサが得た情報を地図情報に照らし合わせて走行しています。極端な言い方をすれば、地図というレールの上を走っているようなものなのですが、地図は作ったそばから古くなり、使い始めた時点ですでに間違っている可能性もあります。それでも、いまの技術レベルでは高精度地図を信じるしかありません。一般道の地図が自専道並みに高精度で正確ならばよいのですが、それは一般道における地図の高コスト化を意味します。
しかし、センサが高性能化し、AIの機能が強化されれば、地図が高精度でなくても、リアルタイムで得る周辺情報を活用しながら走行できるようになります。そうなれば、位置情報に対してプラスマイナス20cm~30cmの精度は必要なく、せいぜいプラスマイナス1mくらいで良くなるでしょう。これが私たちの提案する「DGM(Detailed Geometry Map:高詳細地図)」の基本的な考え方です。
――DGMについてもう少し詳しく教えてください。
野村: DGMはカーナビ用の地図をベースに高精度地図と同様なモデルを生成することで、高精度地図のカバレッジを補完することを目的としています。
カーナビ用の地図は道路を中心線一本で扱っていますが、実際の道路には幅がありますし、車線や停止線、横断歩道などもありますよね。DGMではこれらの情報を光学カメラやミリ波レーダ、LiDARなどから獲得します。そして、それらを組み合わせることで、高精度地図の利用時と同様なパフォーマンスを得ることを可能とします。
たとえば、カーナビを使って走行しているときに「この先300mを右折です」と案内されたら、早めに右車線に寄ろうと考えますよね。でも、その交差点では4車線のうち右側3車線がすべて右折可能で、車線変更の必要がなかった……といった経験はないでしょうか。DGMをカーナビに使った場合、車線情報が付与されるので、レーンキープが良いのか、車線変更が必要か、走行すべき車線の案内も可能になります。
1台の自動運転車の経験を広く生かす
――このDGMが冒頭に触れた「新たなコンテンツ」ということですね。無理な車線変更は交通事故の原因になりますから、安全性向上にも貢献する技術だといえそうですが、カーナビが扱う情報量が格段に増えるのではないでしょうか。
野村: 現状のカーナビの地図よりは情報量が増えますが、組み込み系のカーナビを扱っているメーカーさんであれば十分に対応できると思います。すでに地図メーカーさんとの開発プロジェクトが始まっていて、2021年度には何かしらの形でリリースしたいと思っています。
さらに、私たちはDGMに埋め込むロジックとして「ADD(Autonomous Driving experience Database:自動運転用経験データベース)」も提案しています。
――ADDの概要を教えてください。
ADDの導入で渋滞情報などが事前に把握できる(提供:日立製作所 野村高司氏) ※クリックで拡大します
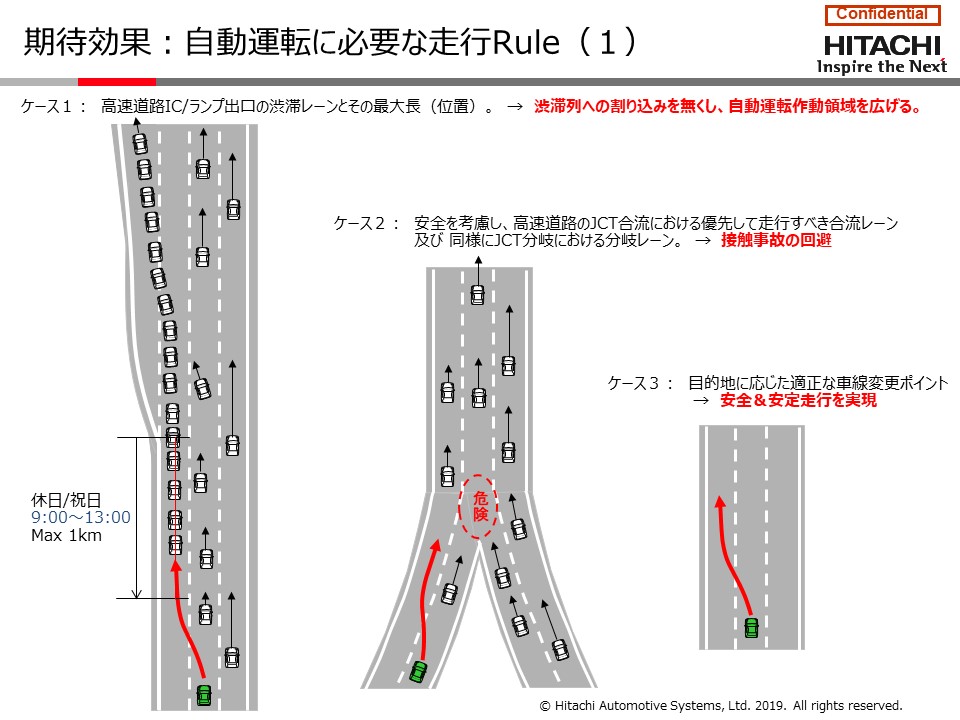
野村: たとえば、高速道路のインターチェンジで週末になると混雑する出口がありますよね。何kmも前から長い行列ができていて、それを知っている人は列に並びますが、ずいぶんと先に進んでから出口待ちの行列だったと気づくと、途中で割り込むしかありません。いつも同じタイミングで発生する渋滞は車両のプローブ情報から把握できますから、それをADDにストックしておけば、そこに至る前に渋滞情報を知ることができます。ただ、私たちはADDをカーナビ用ではなく、ADAS(先進運転支援システム)および自動運転システム向けだと考えています。
――その場合はどういった活用方法が考えられるでしょうか。

ADDで“経験”が広く共有されるようになる(提供:日立製作所 野村高司氏) ※クリックで拡大します
野村: 具体的なシチュエーションを1つご紹介しましょう。場所はセンターラインがある、やや広めの片側1車線の道路。朝夕のラッシュ時には交差点で右折待ちの行列ができます。こういう場面で、慣れたドライバーは右折待ち車両の左側が空いていたら、スッと横を通り抜けて直進しますよね。道路交通法の議論は置いておくとして、人間のドライバーはこういった行動をすることが珍しくありません。
自動運転車両ならば、片側1車線の道路ですから通り抜けをせずに待つはずです。しかし、人によっては待つのも時間の無駄だからと自動運転システムを解除し、自分でステアリングを握って左側を通り抜けるかもしれません。この経験をデータベース化するのです。
その際の記述は非常にシンプルで「自動運転システムが解除された」「人間が運転した」「車線の左側を走行した」という程度。次に同じ場面に遭遇したら、自動運転システムはADDの情報を参照し、車載センサの情報をもとに左側を通り抜けられるかを検証、走行可能だと判断したら実行します。この程度の事例ならば1回の経験で十分データベース化できます。
――ADDの情報は誰もが活用できるものでしょうか。
野村: 同じECU(電子制御ユニット)を載せていれば、データの共有は可能です。先の事例で、最初に通り抜けを経験したのが普通乗用車だとしても、その経験はトラックでも生かすことができます。同じシチュエーションになった際に、自車の車幅と道路の空きスペースを照らし合わせて、通れるかどうかを判断できればよいわけです。
このようにADDを使えば使うほど自動運転システムが賢くなり、車両の性能が向上しますから、おそらくADDはOEM各社さんがそれぞれに運用することになるだろうと思います。
――ありがとうございました。ReVisionモビリティサミットでまた詳しくお話を聞かせてください。